ニチモ 1/450 南極観測船 砕氷艦 しらせ 建造記の2回目となります。
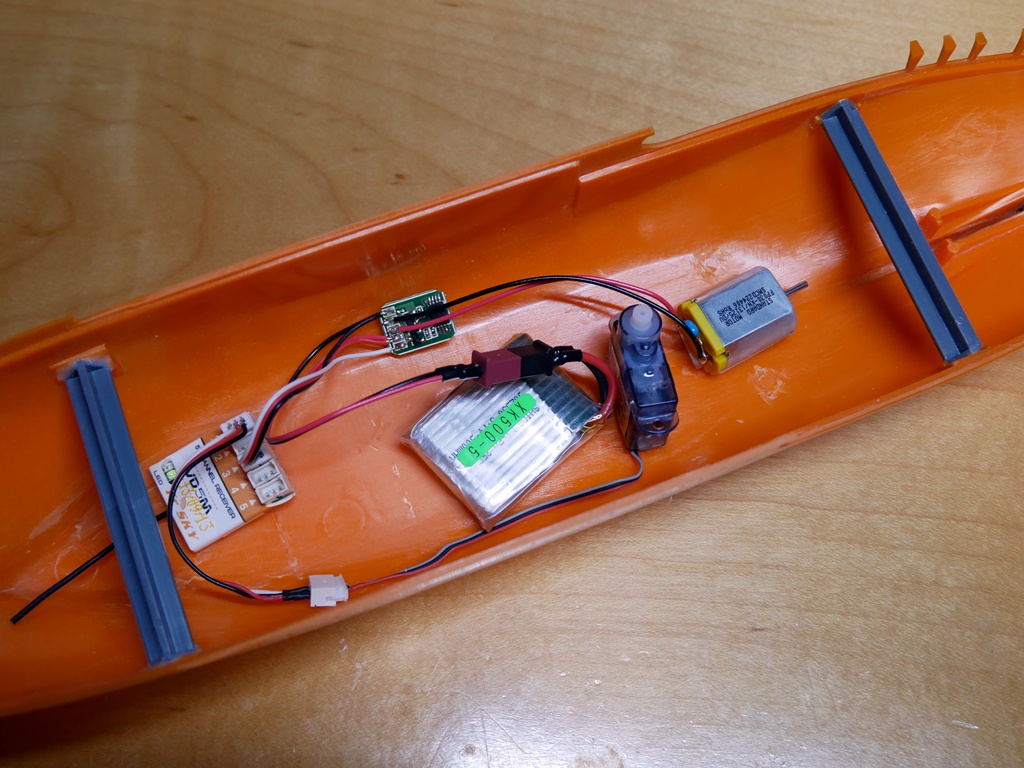
受信機、ESC、モーター、サーボを結線して動作確認しました。
使用したパーツは以下のものです。
受信機:FrSky VD5M
ESC:KOG MC21 リポ1セル専用 モータ スピード コントローラ
モーター:タミヤ ミニモーター(エレクラフトシリーズ No.75026 ミニモーターセット)
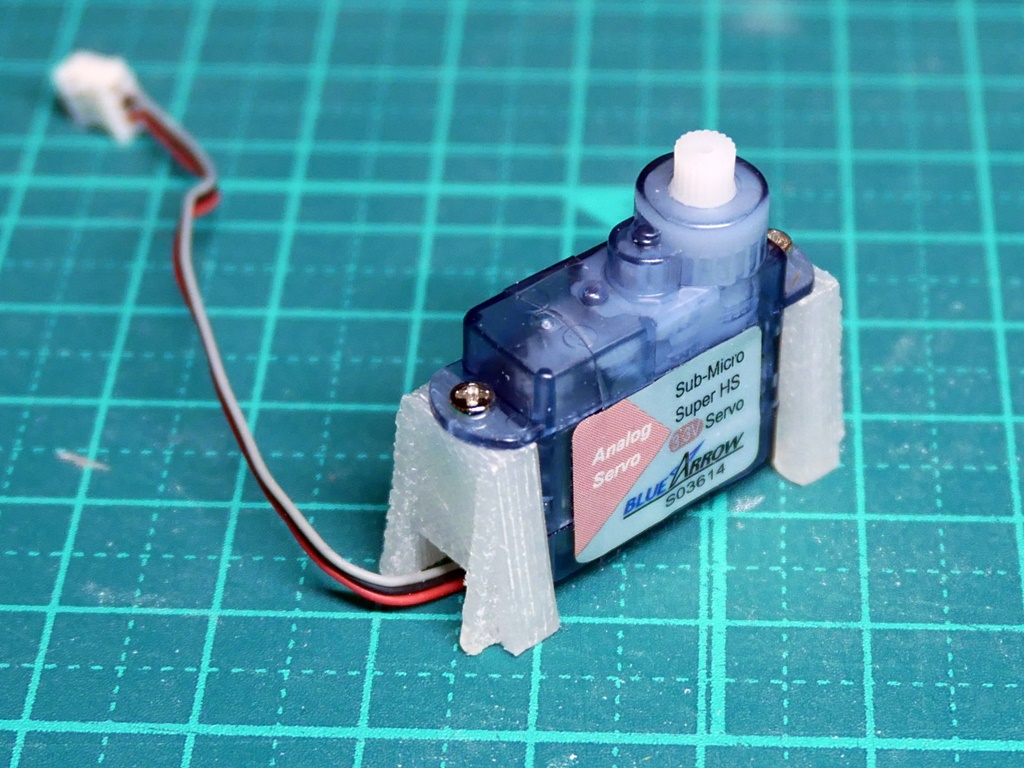
サーボ:Blue Arrow SO3614
バッテリー:XK K123用 Li-Po 3.7V 500mAh
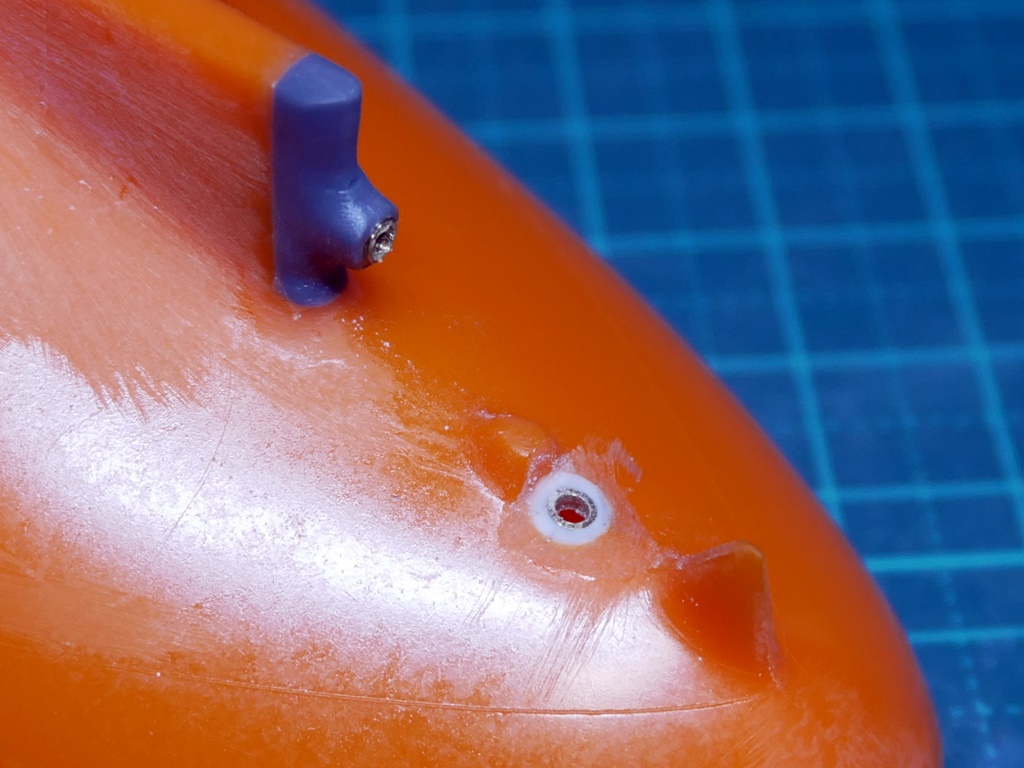
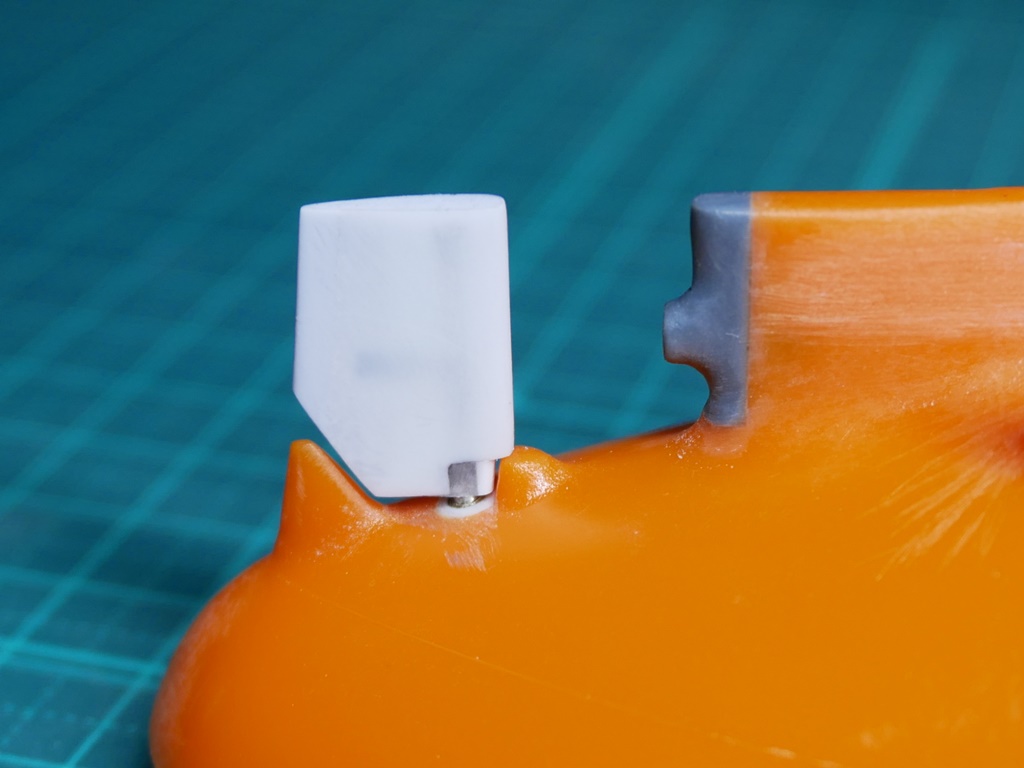
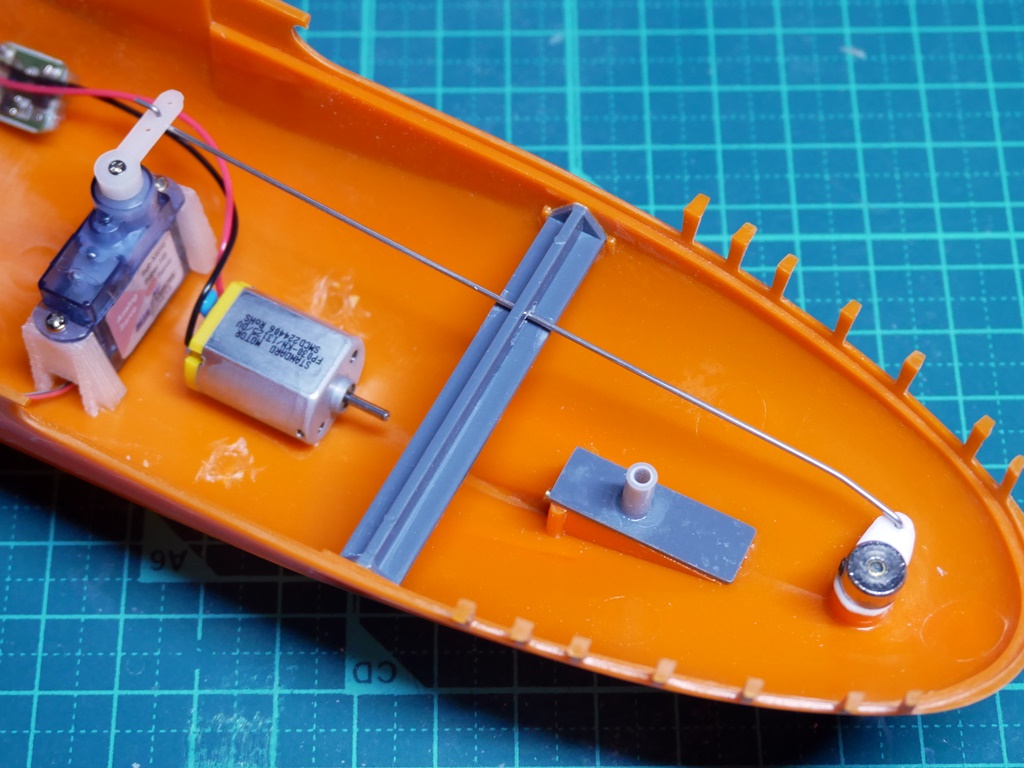
舵鞘となる部分は、キットの舵を固定するゴムパイプがはまる穴を流用しました。
船体内の高さがあるので、甲板下5mm程の隙間が出来るように上部分は切り取り、内径1.5mmの真ちゅうパイプを固定。
船体外の部分は、1mm厚のプラ板を同心円状に切り抜き、固定後に中央にはやはり内径1.5mmの真ちゅうパイプを固定しました。
また、同時にモーターとスタンチューブとなる真ちゅうパイプを固定しています。
この時にモーターとスクリューシャフトを真ちゅうパイプでつなぎ、一直線になるようにしてから最初にモーターをセメダイン スーパーX2を使って船体に接着、接着剤硬化後にスタンチューブを瞬間接着剤で固定しました。

サーボを固定するサーボベッドはいつものプラ棒の組み合わせでは無く、3Dプリンタで作りました。
まずは、Fusion360で作図。
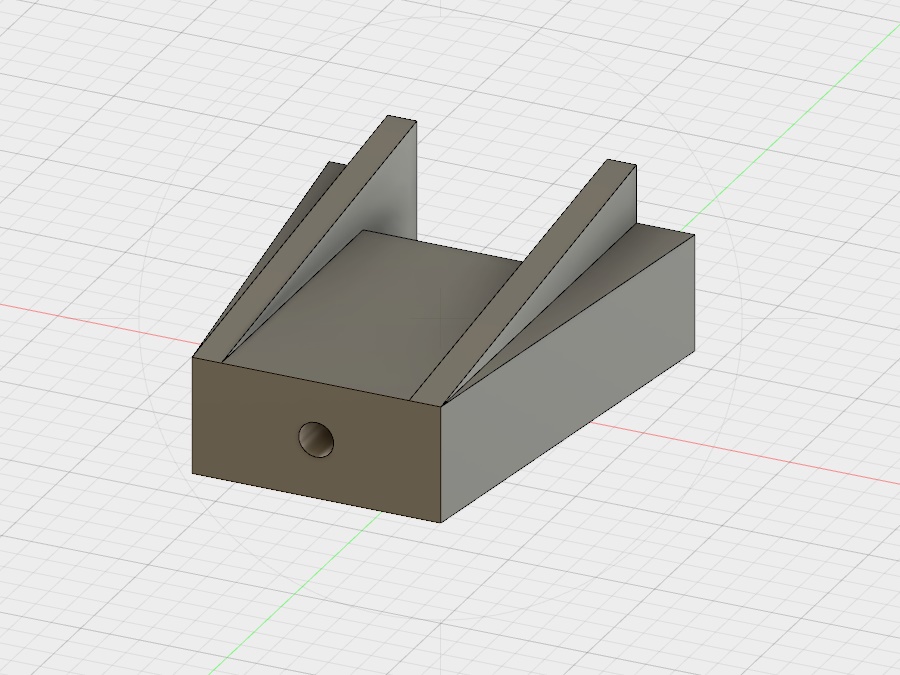
3Dプリンタで出力。
手持ちのプリンタが安い物なので、それほど精度は良くありませんが調整さえしておけばそれなりのものは出来てきますね。
何より、同じ形のものをいくつも出力できるのは助かります。
また、寸法を変更すれば他のサーボ用のも作れるので、1つデータを作っておけば使い回しが効いて良いですね。
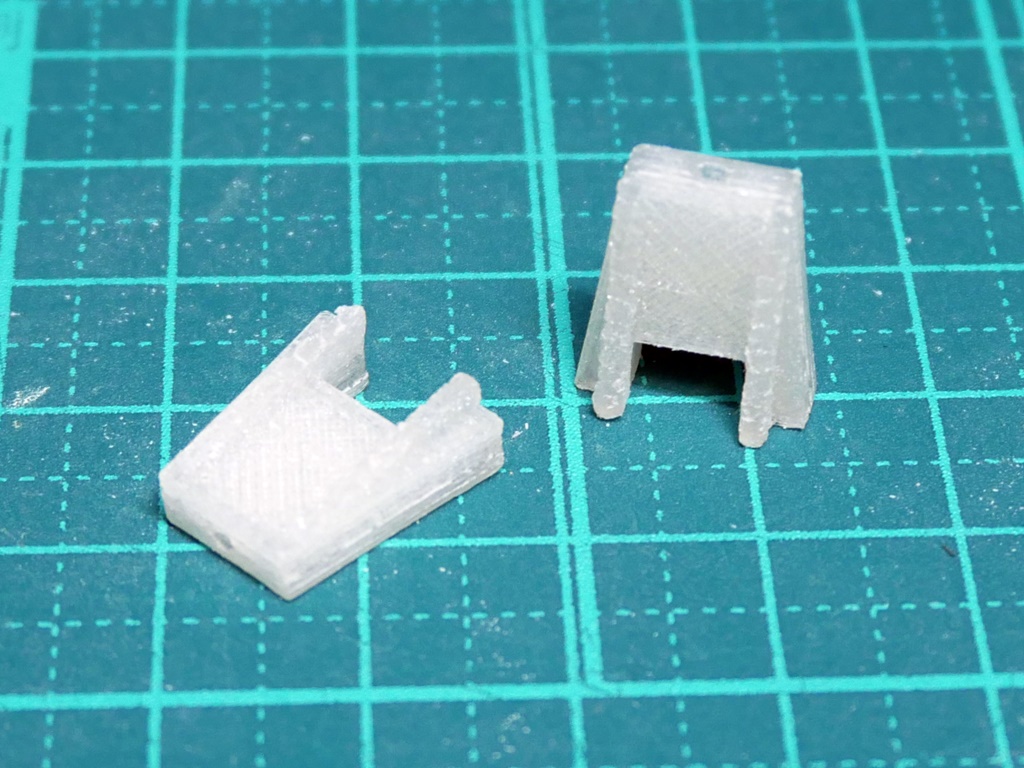
サーボに装着するとこんな感じになります。
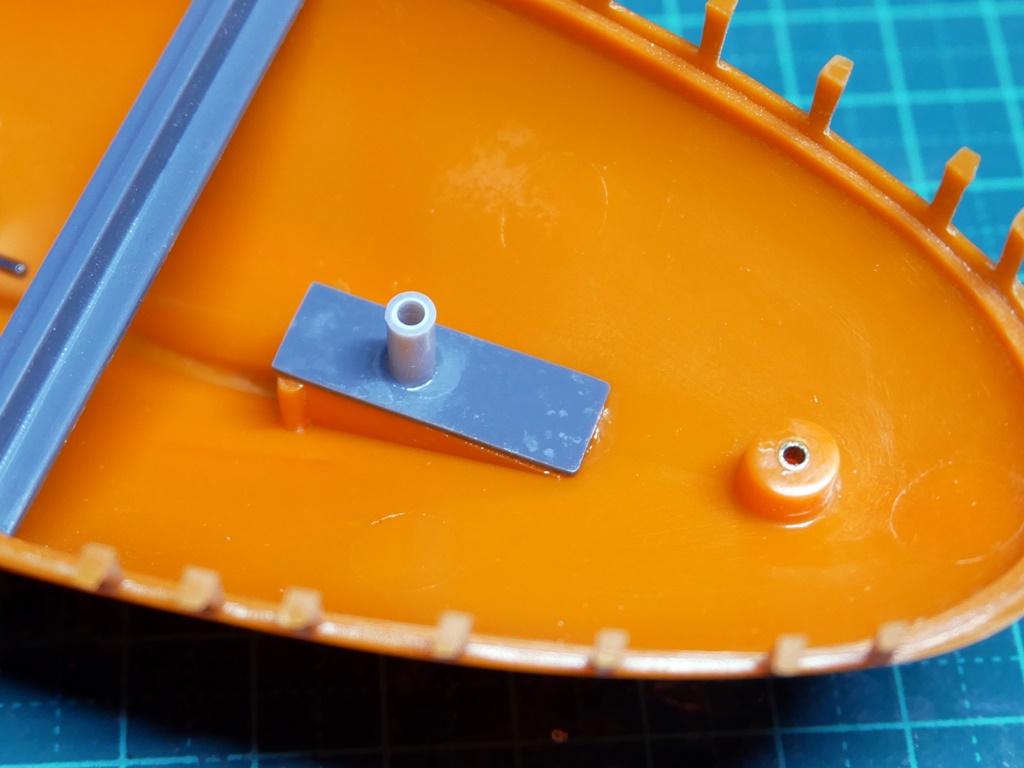
スクリューシャフトの防水にはキットがモーターライズだった頃の名残であるグリスボックスをそのまま流用します。
蓋になるパーツに穴を開けて、プラパイプを接着しました。
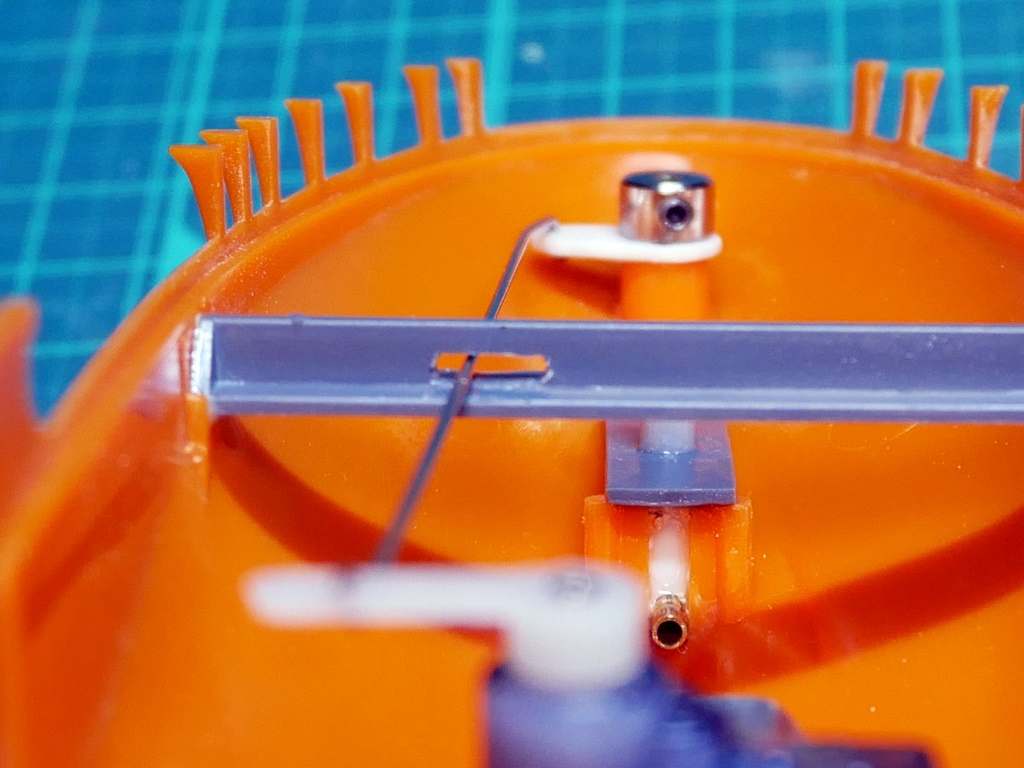
前回作った舵ですが、少しだけ形を変更しました。
舵のリンケージホーンは、スプリングジョイントのヘッド部分を流用してアーム部分は1mm厚のプラ板から作っています。
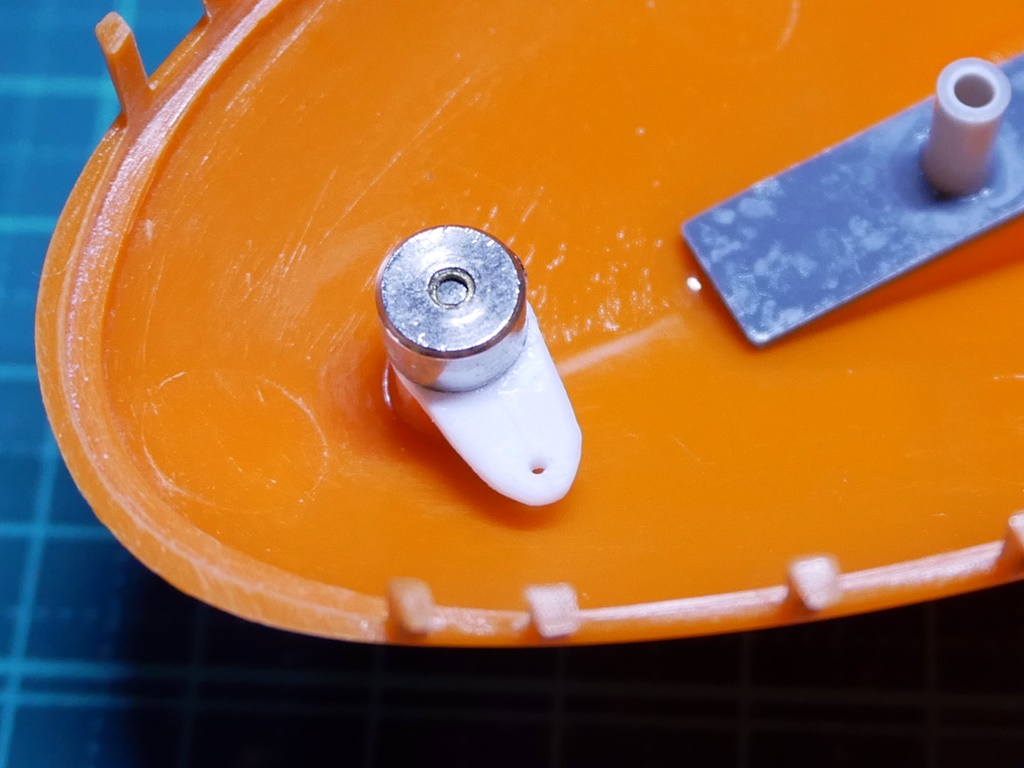
0.8mmのステンレス線をリンケージロッドとして接続しました。
リンケージロッドが通る部分は船体幅を固定する梁があるので、その間を通すように梁に穴を開けています。
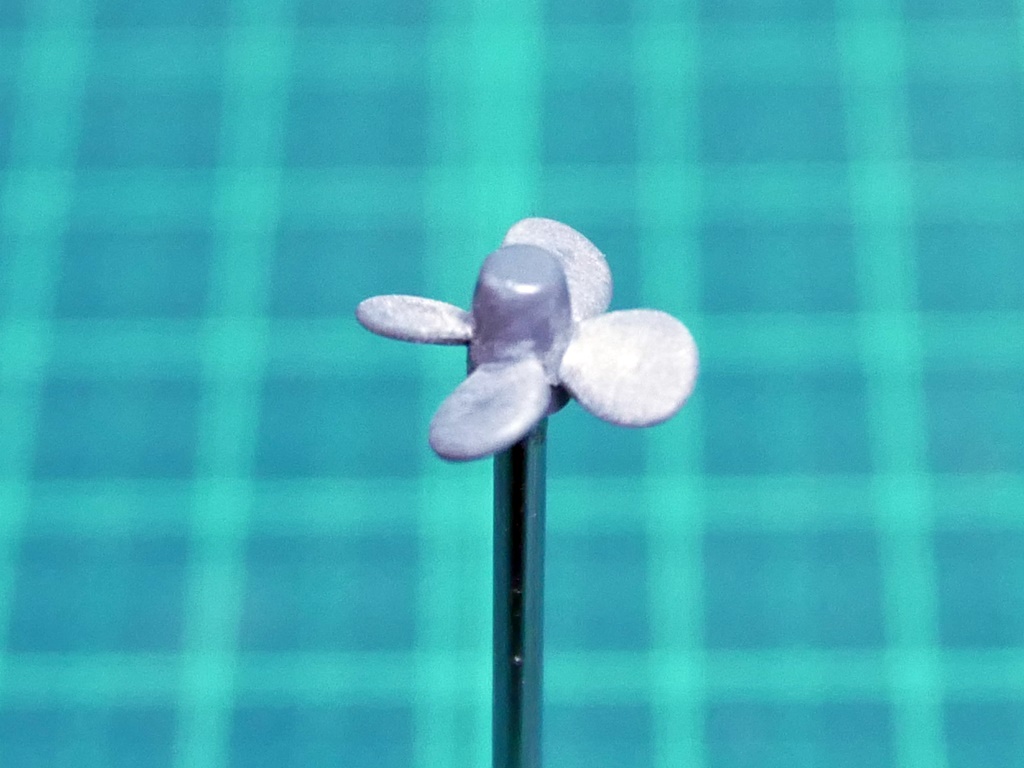
スクリューはキットのものを流用です。
1.5mmのステンレス線を接着して、羽根部分を軽く整えました。
動作に必要なパーツは一通り揃ったので、グリスボックスと舵鞘にグリスを充填して風呂場で走航テストを行いました。
フルスロットルでは結構なスピードが出ます。
巡航はハーフスロットルぐらいで丁度良さそうです。
舵の効きも良く、小回りが効いて良い感じです。

これで動力部分は出来上がりましたので、船体内にもう少し手を加えてから外装の組み立てに入ります。
いつも、動くところまでは早く出来上がるものの、そのあとに時間がかかるのですが、今回はディテールアップもそこそこにさっさと完成させたい所です。
とは言え、ついつい手を加えたくなっちゃうんですよね(^^;

コメント
お疲れ様です。
やはり、1セル仕様はKOG製のアンプしかなさそうですねーf^_^;
私もヤマト2202 1/1000では
同じアンプを使う予定です!
ミチシルベさん、こんばんは。
使い勝手の良さなど考えると、1セル用はKOGさんとこの1択って感じですね(^^;
1/1000 ヤマトをRC化ですか!楽しみにしています(^_^)
雲山さん こんばんわ
あけおめことよろです。(^∀^)/
今年の新造船は「しらせ」で来ましたか~ てっきり潜水艦かと思ってました。
3Dプリンターですが出力される樹脂ってABS積層ですか? それとも紫外線で固まる樹脂? 強度や接着剤の選定がちょっと気になります。
3Dプリンターって射出成型では重要な設計要件(アンダーカットや肉抜き パーティングラインなど)を一切考えなくていいからラクですよね~ とりあえずデータがあればハイッ出来上がり!! 便利な世の中になりましたね
yoshiさん、こんばんは(^_^)/
あけおめことよろです♪
はい、新造艦は「しらせ」です♪
Uボート IXC型は引き続きフリーフラッドホールの穴開け中でしばらくは進捗ありません(^^;
一応来週中には全ての穴開けが終わるので、その後は横舵のリンケージ作成とハルの接着が待っています。
3Dプリンターは一般的なFDM(樹脂の積層)タイプになります。今回のサーボベッドはPLAで作りましたがABSのフィラメントも使えるタイプです。
PLAでも接着は瞬着で問題無いのですし、溶着したいときにはアクリサンデーが使用できます。
データさえ作ればそれなりのものはいくつも作れるのは、ほんと便利ですよ。