軽巡 三隈 建造記、4回目です。
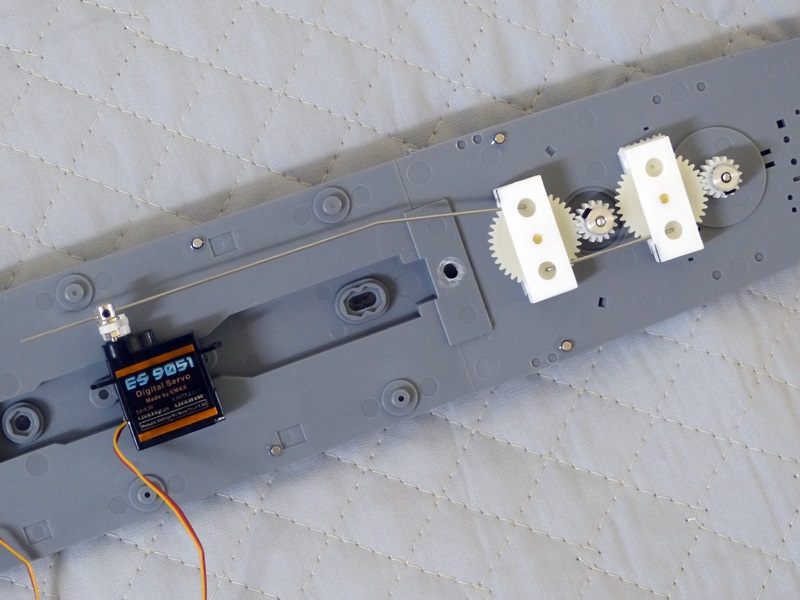
砲塔旋回装置が完成しました。
各ギヤボックスの動きもスムーズで、マイクロサーボで問題無く動きます。
下の写真では、ギヤボックスやサーボを両面テープで仮止めして、動作の確認をしているところです。
マイクロサーボを使うことでのトルク不足が心配でしたが、もう一回り小さいサーボでも大丈夫かもしれません。
実際に船に組み込む際には、サーボをもう数cmかさ上げして、重心を下げる予定です。
また、サーボを乗せる位置もそれぞれ艦首側と艦尾側に寄せます。

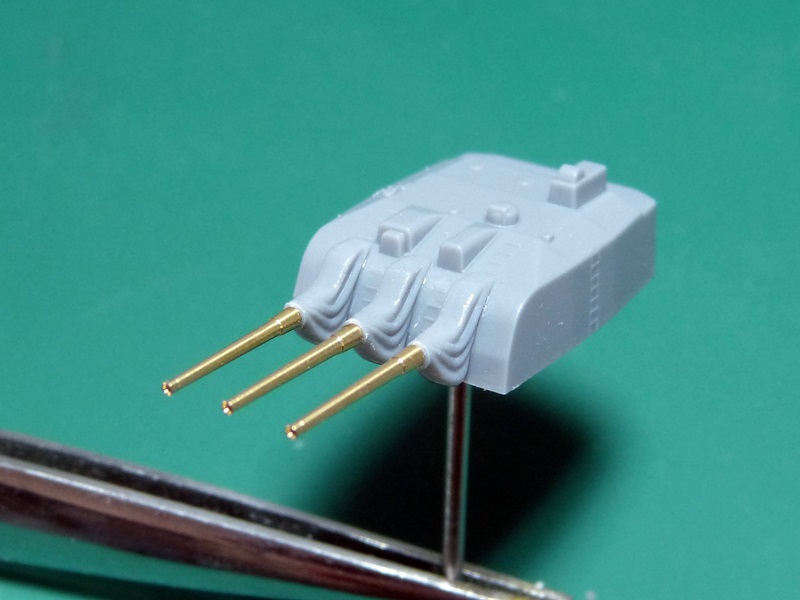
可動部分の工作が一通り終わったので、外観の工作に入りました。
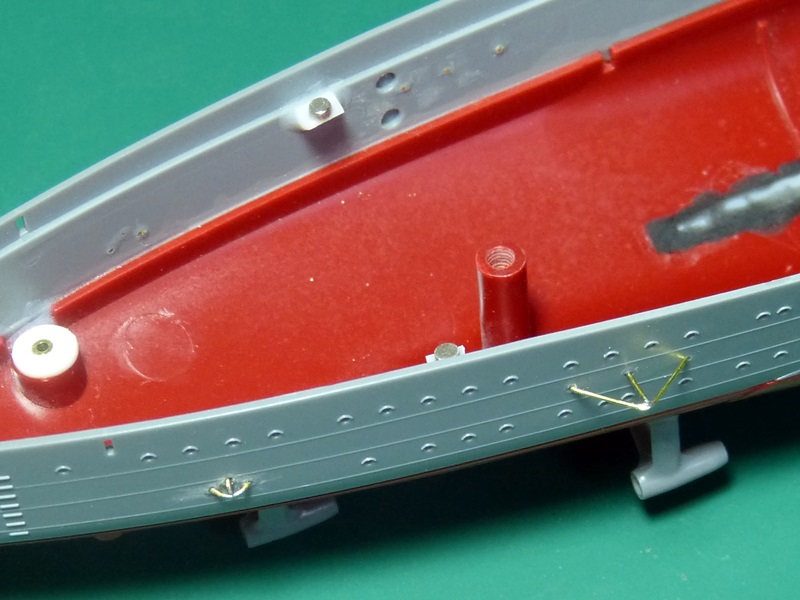
まずは、一番気になっていたスクリューガードの製作です。
後方の小さいガードは凸モールドでちょこんと出っ張っているだけなので、まずはこれを0.4mmの真ちゅう線で作りました。
前方のガードはエッチングパーツがあるのですが、瞬間接着剤で表面にちょこっとくっつけるだけで強度も何も無いため、これまた0.4mmの真ちゅう線で作りました。
両方とも、ある程度の形で真ちゅう線を曲げてから、船体に開けた穴へ差し込んで瞬間接着剤で接着しています。
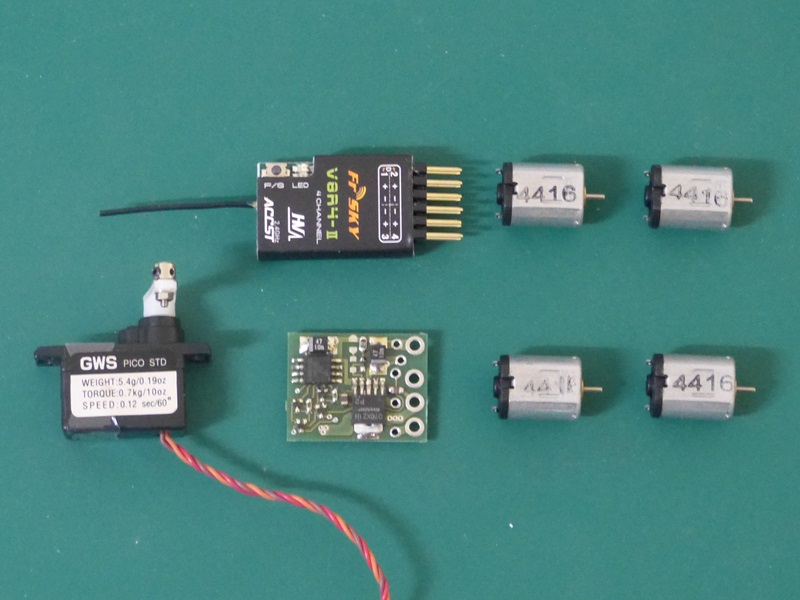
そうそう、今回の三隈に乗せるメカですが、以下のパーツを使います。
受信機は、FrSkyの4ch受信機、V8R4-II。
アンプは、KOGさんのMC12。
ラダーサーボはGWSのPICO STD。
砲塔旋回用のサーボはE-MAXのES9051。
モーターは千石電商で購入したマイクロモーターです。
この他に、RNさん作のマグネットスイッチを使います。
バッテリーはまだ選定中なのですが、600mAh程度の2セルLipoを予定しています。

コメント
雲山さん こんばんわ(^∀^)/
砲塔旋回装置のリンケージがやっと理解出来ました。前回まではギヤをどうやって使うんだろう??? と思ってましたがナットクです。このリンケージだと砲塔の回転角度は180度ぐらいですか?
推進用のモーターですが6V駆動を4個で10A以下? 狙いですか? 573mm の船体で4軸となるとかなりの高速艦となりそうですね(^∀^)/
yoshiさん、こんばんは(^_^)/
はい、砲塔の旋回角度は180度としました。
これで物足りなくなれば、砲塔側の歯車を14Tに替えてもう少し角度を増やします(笑)
モーターは3V仕様なので、2個を直列にして、2組並列で使います。
無負荷時で9000RPMとおとなしめのモーターなので、それ程のスピードは出ないと思いますが、こればかりは走らせてみないとどれだけのスピードが出るか分かりませんね(^^;