追浜はJAMSTECにて行われた、AMMのミーティングへ参加してきました。
私は潜水艦の持ち込み無しで、完成したばかりの不知火と動力部分のみ完成の三隈をもちこんで、隅っこで推進テストを行っていました(^^;

あいにくと三隈の方は写真無しです。
不知火も三隈も2セルのリポを使うために、3V仕様のモーターを直列につないでいました。
所がこの状態ですと、片方のモーターが何らかの原因で負荷がかかるともう片方のモーターに電圧がかかってしまい、負荷の生じた方のモーターはトルクを失ってしまいます。
ある程度のばらつきは何とかなるかなと思っていたのですが、予想以上に2軸間の違いが出てしまったので結局モーターの結線は並列で接続することとしました。
アンプでエンドポイントを設定して出力をしぼれば、3Vのモーターでも過回転を防ぐことが出来ますので、そうすることにします。
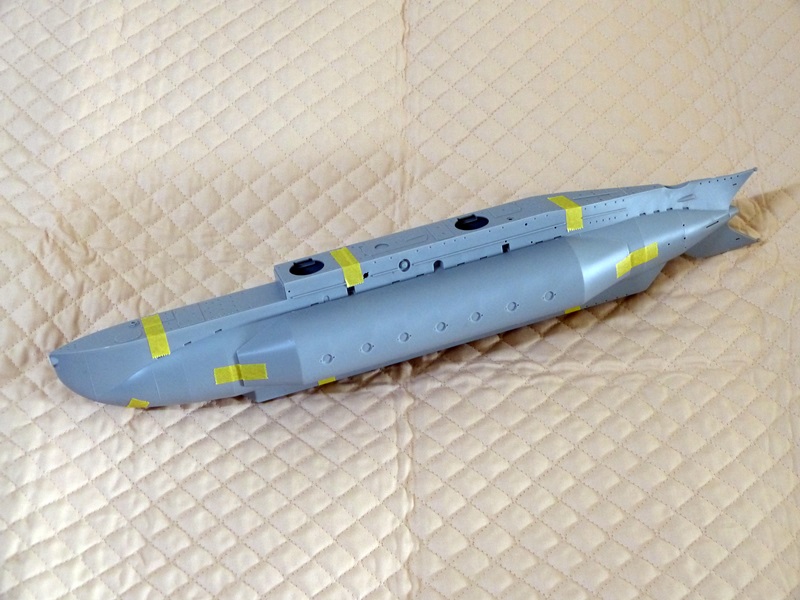
あと、前日に届いたばかりの1/35 X級潜水艦を持ち込みました。

時間が無くて封を開けることすら出来なかったので、現地でランナーから切り出して仮組みしていました(笑)
三隈の建造は塗装と上部構造物の組み立てのみとなりましたので、平行してX級潜水艦の建造に入ります。
以下、今回の参加艇です。
みずよんさんのゼンマイ推進武蔵。
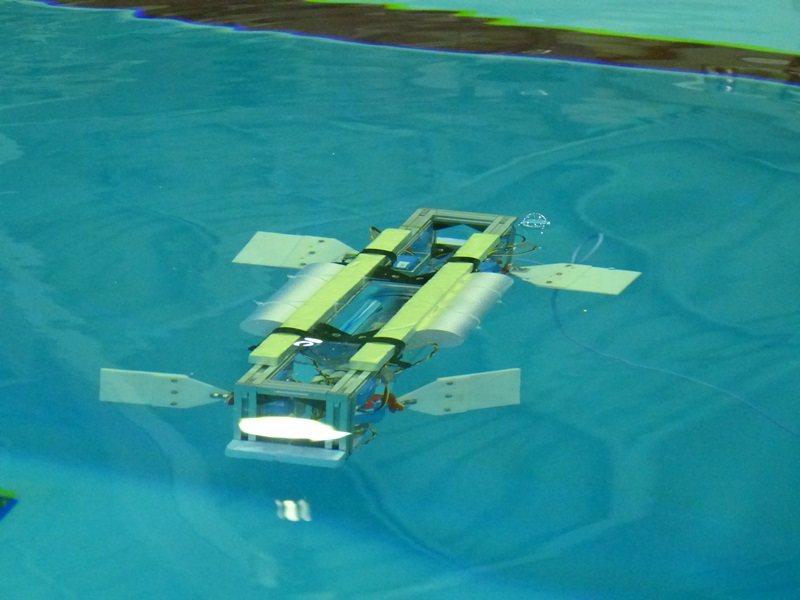
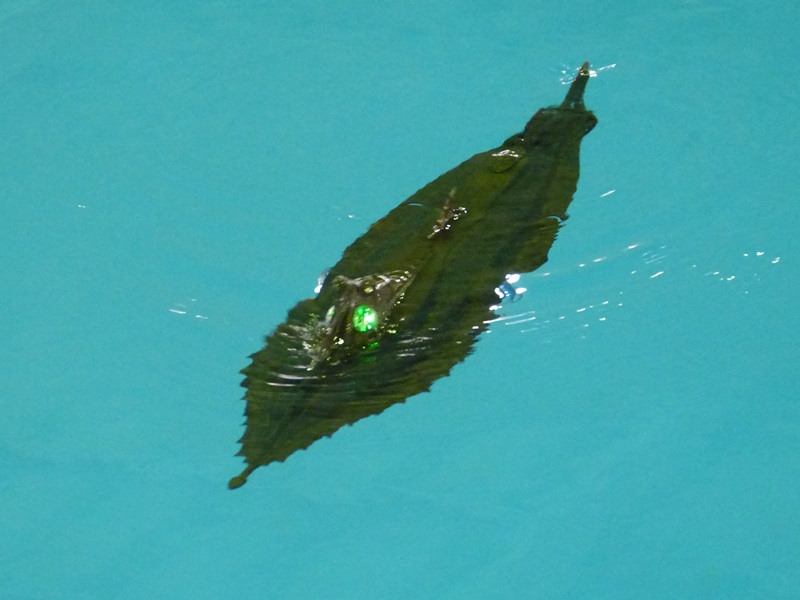
ひれ推進の水中ロボット。
4つのひれを器用に動かして、水中を自由自在に泳いでいました。
yoshiさんのシーガル。
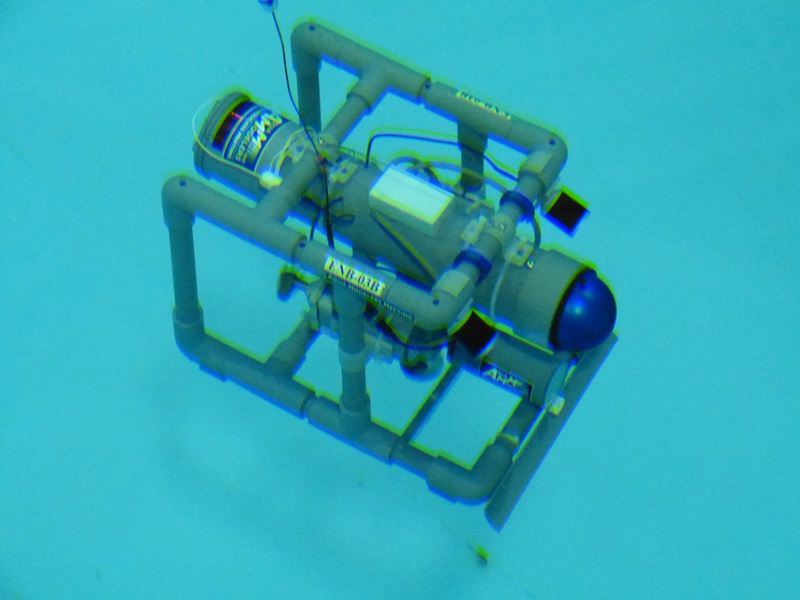
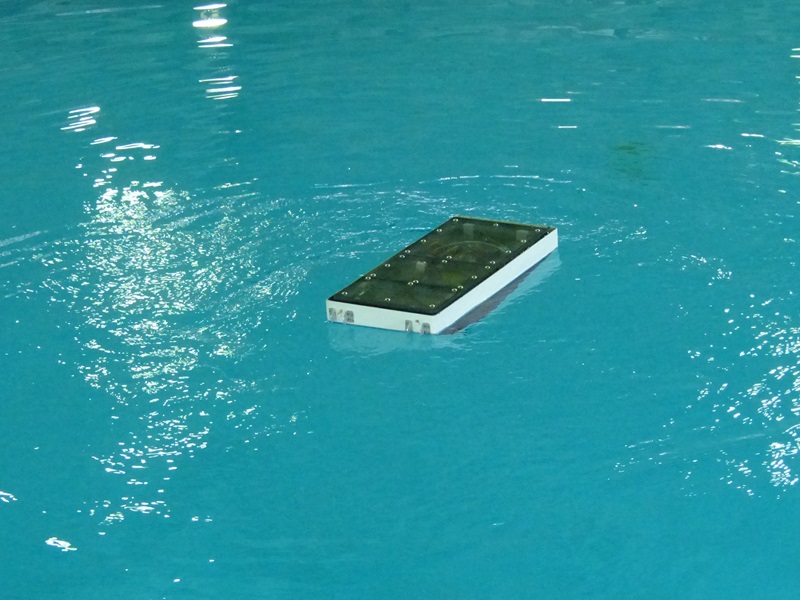
RC艦隊さんのROV。
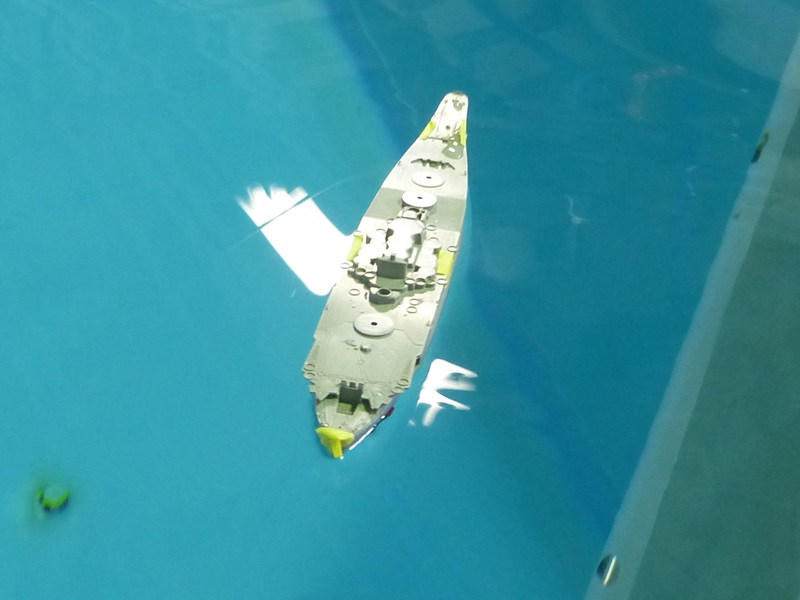
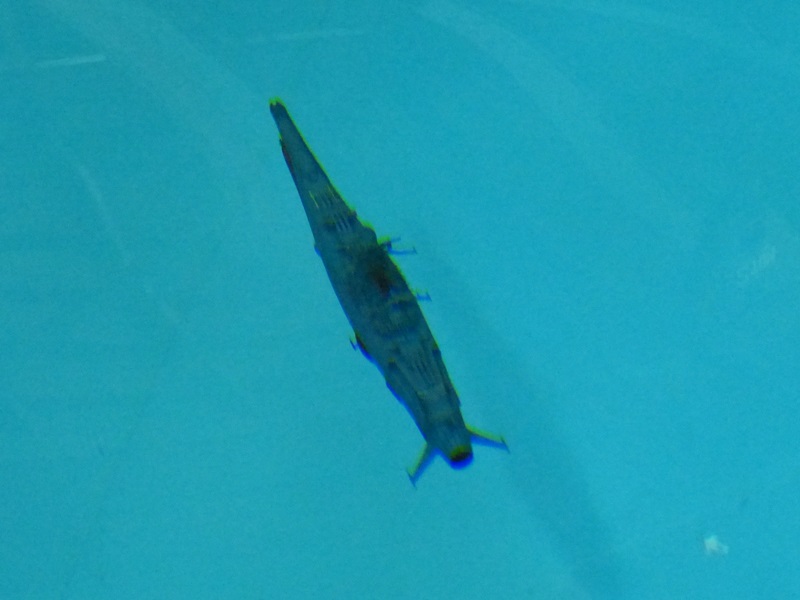
多分トムさんのヤマト(^^;
みずよんさんのゴジラ。

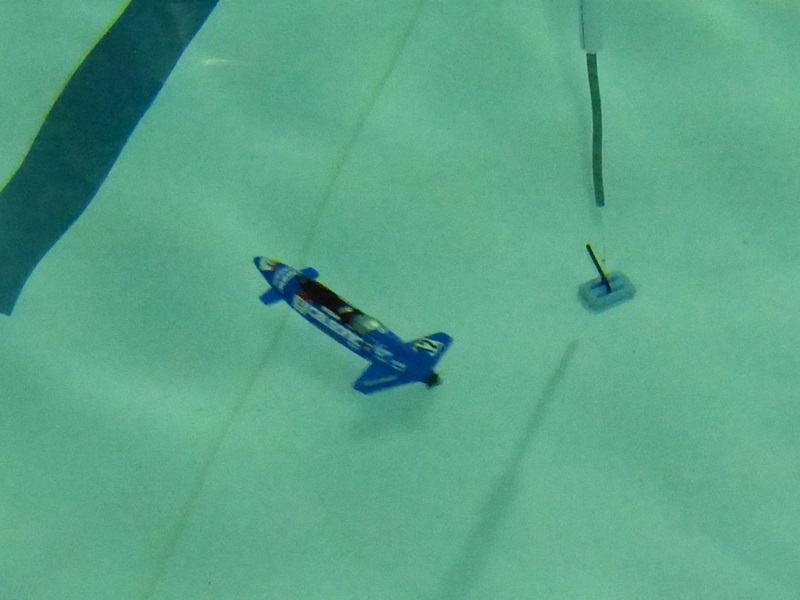
yoshiさんのスプリンガータグ(船体のみ)。
ギミックの一部を拝見できましたが、完成が待ち遠しいです。
トムさんのノーチラス。
YDDさんのエンタープライズ。